habe mir wiedereinmal gedanken gemacht:
ich glaube das ganze wird nicht funktionieren, so wie sich xtj7 das ganze vorstellt (habe selbst am anfang gedacht, dass das positional sensing eigentlich so funktionieren müsste!)
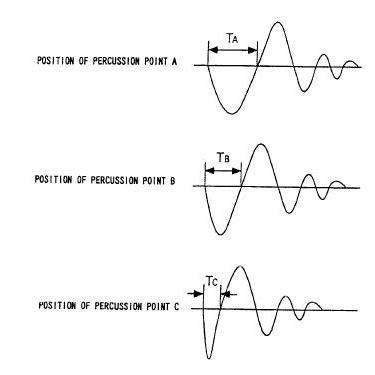
problem an der unterscheidung zwischen head und rim signal ist höchstwahrscheinlich folgendes: wenn ein stick exakt die mitte das mesh-head trifft (also somit auch den head-trigger), so sollte das signal des rim-triggers um einen zeitlichen versatz verschoben kommen. imo ist dieser zeitversatz zu klein - und somit nur äusserst schwer messbar! (damit relativ ungenau und somit nicht zu gebrauchen)
weiterhin wird der rim-trigger ein signal liefern, allerdings, wie tonsel schon erwähnt hat, ist dieses signal sehr "undeutlich"
sollte es also nicht an der zeitlichen auflösung liegen, so könnte man ganz einfach einen versuch machen: man baut sich ein DIY-mesh-head. in die mitte kommt ein üblicher cushion-trigger. ausserhalb der mitte, also nahe am rand platziert man einen analogen cushion-trigger. nun liefern beide "ähnliche" signale beim stroke, allerdings zeitlich versetzt. wenn die sampling-rate des trigger-konverter höher liegt, als dieser zeitliche versatz, so sollte es sehr einfach sein, die position des treffers zu bestimmen!
vorweg ergeben sich allerdings zwei grundlegene probleme:
1. erfolgt der stroke nicht zwischen den beiden cushion-trigger, so kann es aufgrund der eigenschwingungen des felles zu fehlinterpretationen der postions des strokes kommen!!! ---> abhilfe: weitere cushion-trigger im fell platzieren.......aber wer will denn schon alleine 5 trigger-kanäle zum positional triggern verwenden ??? 
2. durch den zusätzlichen cushion-trigger werden bei zusätzlicher rim-trigger-info insgesamt 3 triggerkanäle benötigt (head-center, head-offcenter, rim)..........und imo wird deshalb das positional triggering mittlerweile so betrieben, wie es roland in ihren modulen implementiert hat!!!